Sign Language Robot: ROS2-based Human-Robot Interaction Framework
Project Overview
This project addresses the critical need for innovative accessibility solutions for the deaf and hard of hearing community. Working at the University of Granada, I developed a comprehensive ROS2-based framework enabling human-robot interaction through sign language, creating a bidirectional communication system that can both recognize human signs and produce sign language gestures with a robotic hand.
The system aims to answer a fundamental research question: How can the integration of sign language into human-robot interaction enhance accessibility and inclusivity for individuals who are deaf or hard of hearing?
Technical Implementation
System Architecture
The framework consists of three primary components working in seamless integration:
- Sign Language Recognition: Computer vision system using deep learning to detect and classify hand gestures
- ROS2 Communication Framework: Message-passing architecture connecting all system components
- Robotic Hand Control: Precise motor control to form accurate sign language gestures
The complete ROS2 architecture includes:
- Camera node for gesture capture
- Inference node for sign recognition
- Chat agent for processing recognized signs
- Position controller for robotic hand articulation
- Service interfaces for system integration
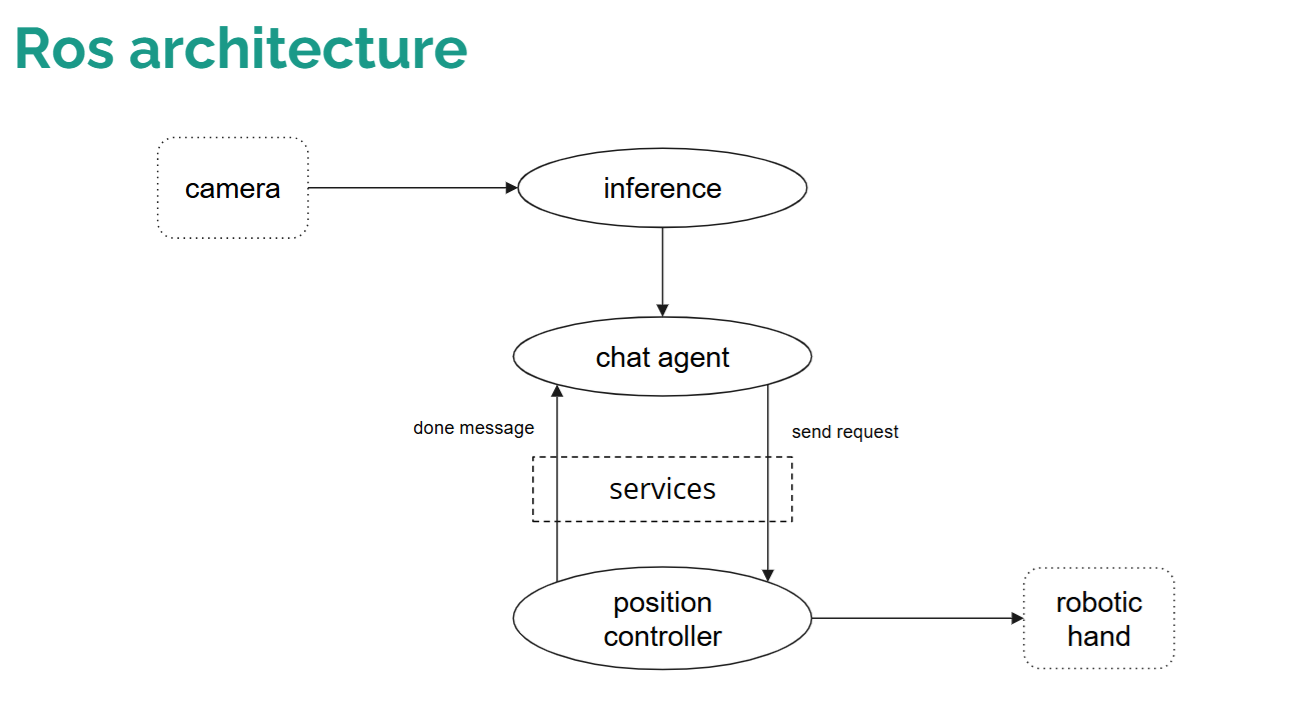 ROS2 architecture showing communication flow between system components
ROS2 architecture showing communication flow between system components
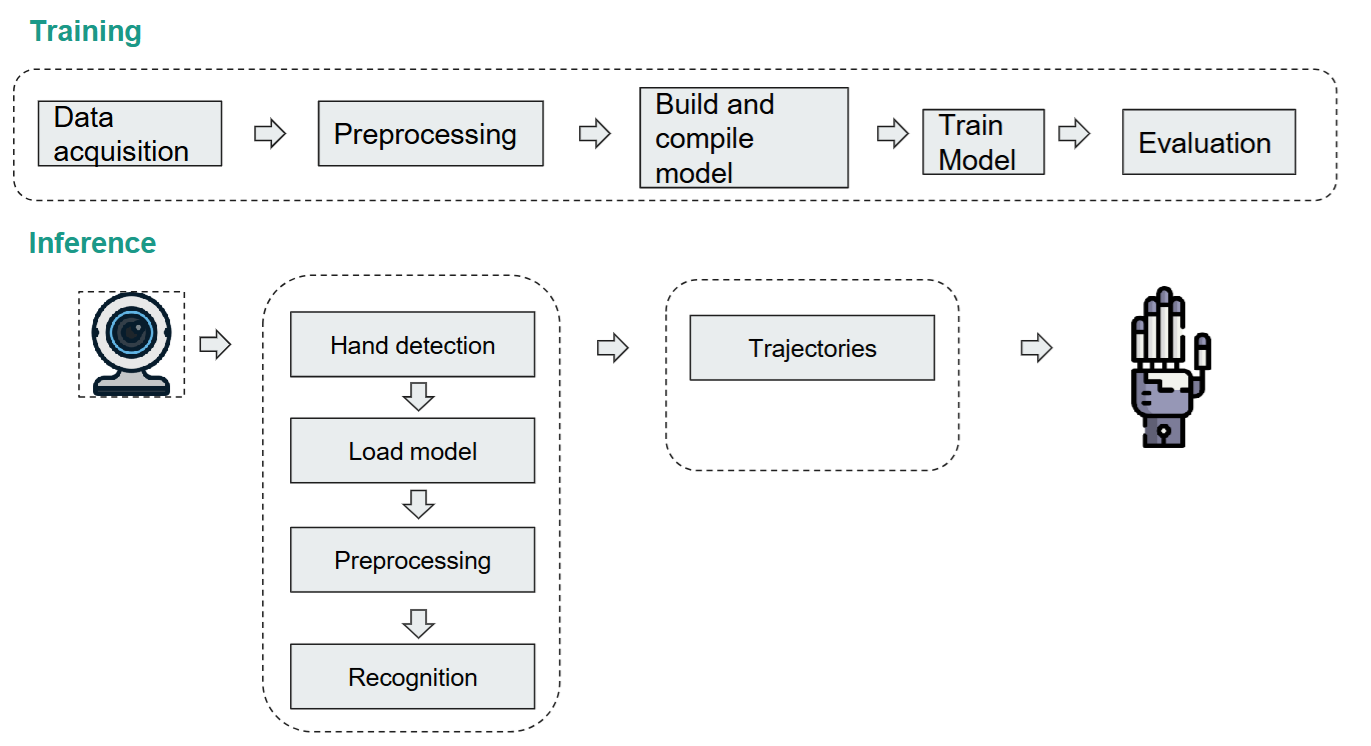
Sign Recognition
I implemented two approaches to sign language recognition:
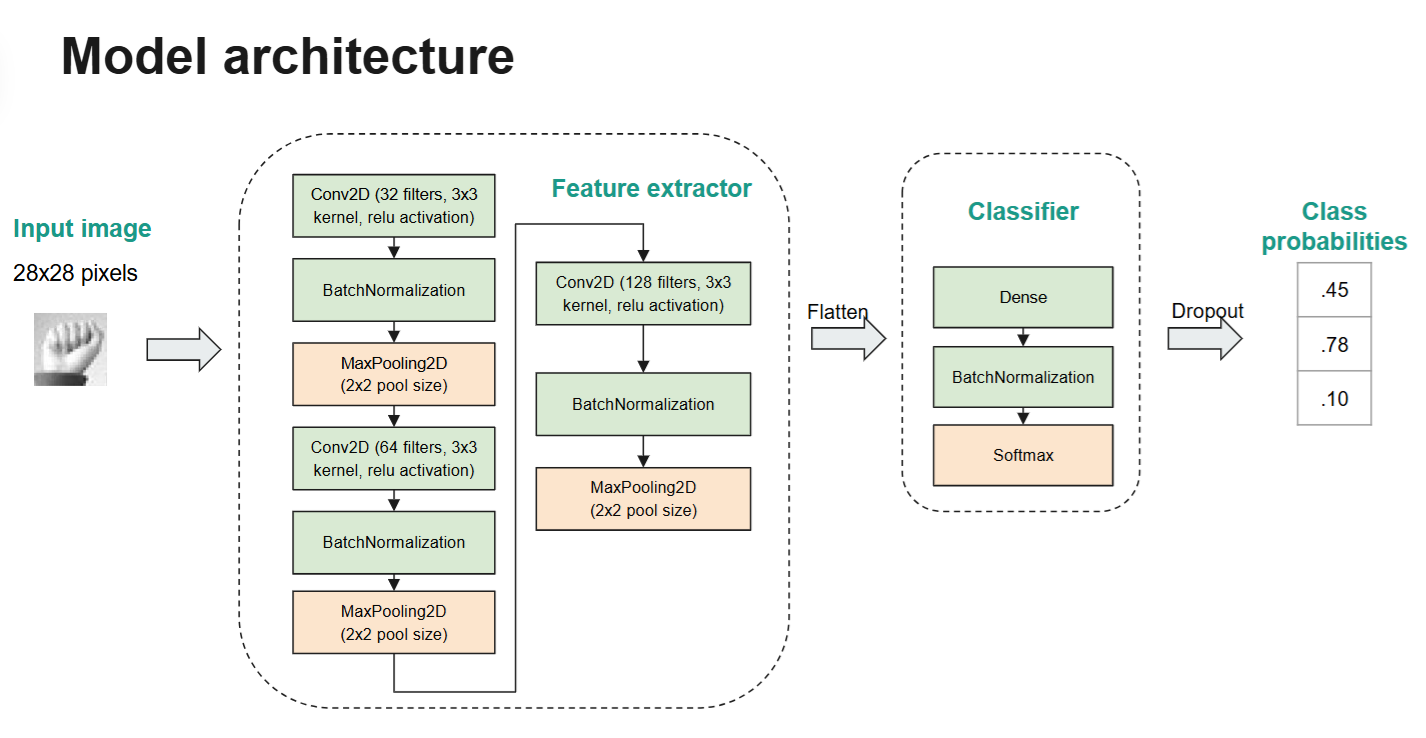
- Static Sign Recognition: CNN-based model trained on the Sign Language MNIST dataset achieving 100% top-1 accuracy on test data
- Preprocessing pipeline for image normalization
- Custom model architecture with convolutional layers, batch normalization, and dropout
- Full confusion matrix validation
- Dynamic Sign Recognition: Advanced system using 543 body landmarks (face, hands, pose) to recognize word-level signs
- Transformer and GRU architectures for temporal sequence modeling
- Landmark reduction and frame interpolation for efficient processing
- Achieved 76.98% accuracy on the public dataset leaderboard

Robotic Hand Control
I developed a complete control system for the robotic hand:
- Created a user-friendly GUI for trajectory control and testing
- Implemented precise motor control for 8 actuators managing 19 degrees of freedom
- Designed a trajectory database mapping recognized signs to motor positions
- Achieved system latency of only ±0.003 seconds
Challenges and Limitations
While the recognition models achieved high accuracy in controlled testing environments, the real-world implementation on the robotic system revealed several important challenges:
- Hardware Constraints: The physical limitations of the robotic hand significantly impacted sign reproduction:
- Ring and little fingers shared the same control mechanism, limiting independent movement
- Inability to cross fingers for certain signs
- Limited finger span compared to human hands
- Constraints in achieving precise thumb positions required for some signs
- Recognition-to-Execution Gap: The high accuracy of the recognition algorithms in testing environments did not directly translate to successful execution in the full robotic system due to:
- Environmental variations (lighting, background, etc.)
- Differences between training data and real-world inputs
- Real-time processing requirements
- ROS2 Integration Challenges:
- ROS2 incompatibility with Gazebo simulation limited testing options
- Only the left robotic hand was fully supported in the ROS2 implementation
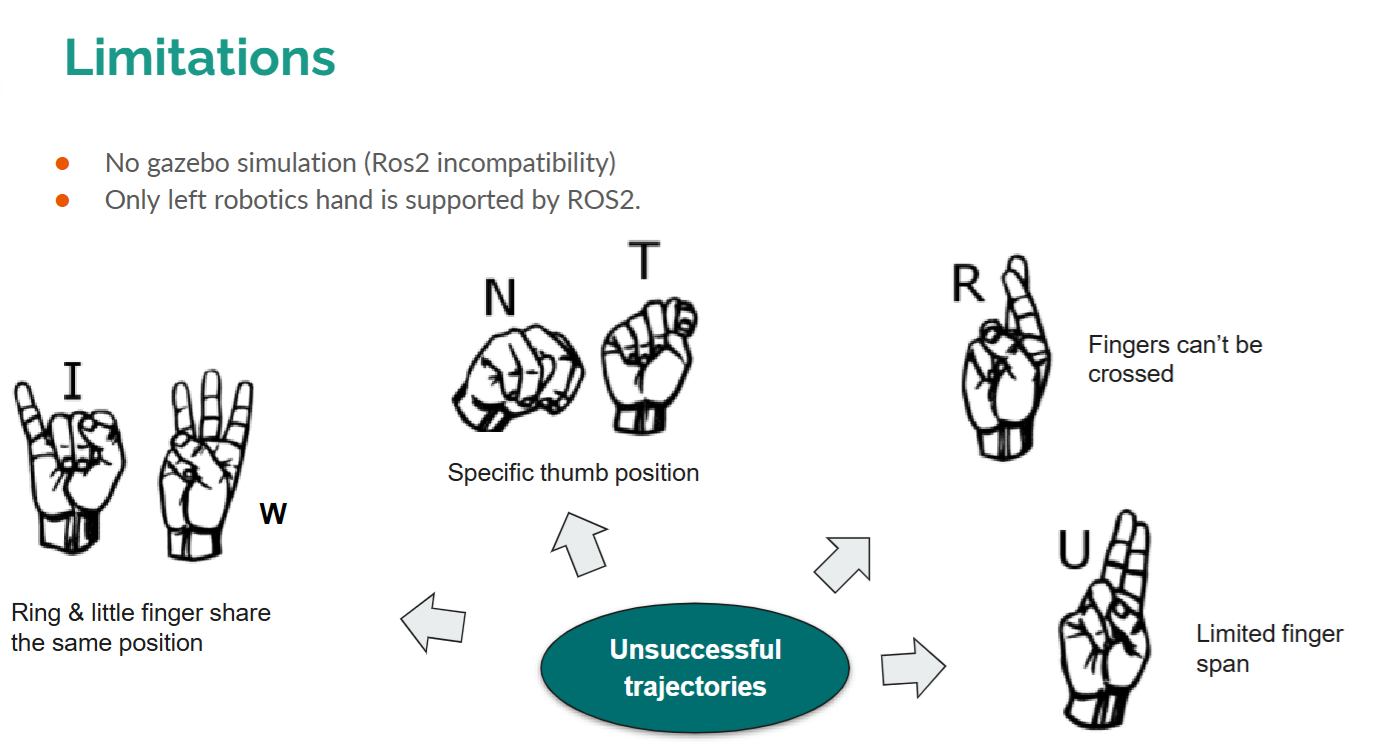 Examples of signs that proved challenging for the robotic hand due to physical limitations
Examples of signs that proved challenging for the robotic hand due to physical limitations
These challenges provided valuable insights into the gap between algorithmic performance and practical robotics implementation - an important learning outcome of the project.
Impact and Applications
Despite the implementation challenges, this project demonstrated:
- The viability of computer vision approaches for sign language recognition
- The potential for ROS2-based frameworks in assistive technology
- Clear identification of hardware requirements for effective sign language robots
The research highlighted both the promise and current limitations of robotic sign language interpretation, providing a foundation for future improvements in the field.
Future Directions
Based on the challenges encountered, future development should focus on:
- Improved robotic hand designs with greater dexterity and independent finger control
- Bridging the gap between algorithmic and real-world performance through domain adaptation
- Enhancing the system with facial expression capabilities for complete grammatical context
- Development of hardware specifically designed for sign language reproduction
Technologies Used
- Computer Vision: MediaPipe, OpenCV
- Machine Learning: TensorFlow, CNN, Transformer, GRU
- Robotics: ROS2, Motor Control
- Development: Python, C++
Key Learnings
This project provided valuable insights into:
- The complexities of translating computer vision models to practical robotic applications
- Hardware design requirements for effective sign language reproduction
- The importance of considering physical constraints when designing assistive technology
- Effective implementation of ROS2 for complex human-robot interaction systems